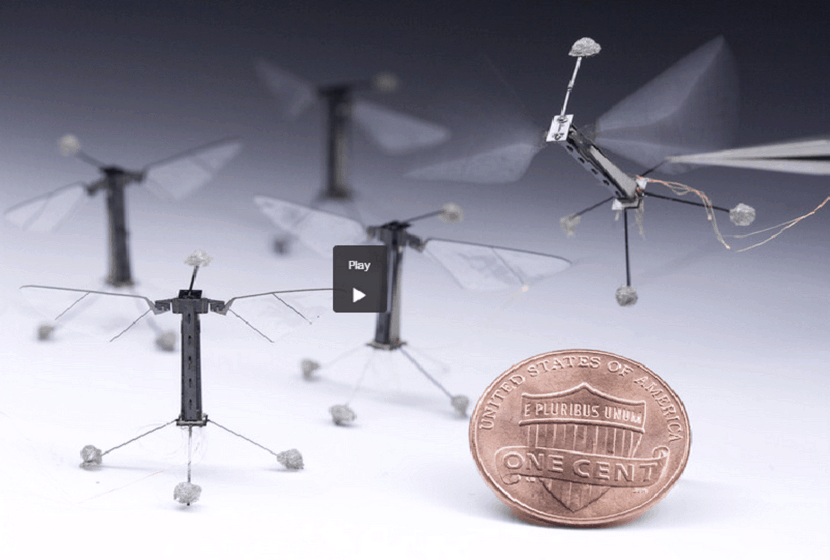
L’été dernier, dans un laboratoire de robotique de Harvard, un insecte a pris son envol. D’une taille équivalente à la moitié d’un trombone, pesant moins d’un dixième de gramme, il a bondi de quelques centimètres, a plané pendant un moment sur ses fragiles ailes battantes, puis a filé dans l’air.
Comme un parent fier regardant son enfant faire ses premiers pas, l’étudiant diplômé Pakpong Chirarattananon a immédiatement réalisé une vidéo du prodige et l’a envoyé par courriel à son conseiller en indiquant dans la ligne « ‘objet » : « Flight of the Robobee. »
« J’étais tellement excité, je ne pouvais pas dormir !», se souvient Chirarattananon, co-auteur principal d’un article publié cette semaine dans Science.
La démonstration du premier vol contrôlé d’un robot insecte est l’aboutissement de dix ans de travail, menés par des chercheurs de la Harvard School of Engineering et sciences appliquées (SEAS) et l’ Institut Wyss.
«C’est le résultat de ce que j’ai essayé de faire pendant ces 12 dernières années», explique Robert J. Wood, Professeur de sciences appliquées de SEAS, Wyss membre du corps professoral de base, et investigateur principal de la National Science Foundation soutenant le projet Robobee. «C’est vraiment en raison des récentes découvertes de ce laboratoire de fabrication, des matériaux et de la conception que nous avons pu réusir. Et cela fonctionne simplement spectaculairement bien ! «
Inspiré par la biologie de la mouche, avec une anatomie à l’échelle submillimétrique et deux ailes très minces presque invisibles, au battement de 120 fois par seconde, le petit appareil ne représente pas seulement la pointe absolue de systèmes de microfabrication et de contrôle, mais il est l’aboutissement d’une innovation très poussée dans ce domaine par des dizaines de chercheurs d’Harvard depuis des années.
«Nous avons dû développer des solutions à partir de zéro», explique Wood. «Les grands robots peuvent fonctionner sur des moteurs électromagnétiques, mais à cette petite échelle vous devez venir avec une solution de rechange, et il n’y en avait pas une seule», explique le co-auteur principal Kevin Y. Ma, étudiant diplômé de SEAS.
Les petits robots battent des ailes grâce à des actionneurs piézoélectriques – bandes de céramique qui se dilatent et se contractent quand un champ électrique est appliqué. Des charnières minces de matière plastique incorporées dans la fibre châssis de corps de carbone servent d’articulations, et un système de commande équilibré commande délicatement le mouvement de rotation dans le robot , avec chaque aile commandée indépendamment en temps réel.
Avec leurs écailles minuscules, de simples petites modifications du débit d’air peuvent avoir un effet énorme sur la dynamique de vol, et le système de contrôle doit réagir beaucoup plus rapidement pour rester stable.
Les insectes robotiques profitent également d’une ingénieuse technique de fabrication du style pop-up qui a été développée par l’équipe en 2011. Des feuilles de divers matériaux découpées au laser sont disposées en couches » sandwich « dans une plaque mince qui se replie comme un livre pop-up.
Là, un processus étape par étape rapide remplace ce qui était autrefois un art manuel minutieux et permet à l’équipe d’utiliser des matériaux plus robustes, tout en améliorant la précision globale de chaque appareil.
«Nous pouvons maintenant construire très rapidement des prototypes fiables, ce qui nous permet d’être plus agressifs dans la façon dont nous les testons», dit Ma, ajoutant que l’équipe a réalisé vingt prototypes durant les six derniers mois.
Le projet Robobee vise à créer une armée de pollinisateurs robotiques autonomes, mais il pourrait également servir dans le domaine de la surveillance militaire et dans l’exploration dans des environnements dangereux. En s’inspirant de la robustesse physique des abeilles et de leurs capacités de vol stationnaire avec de lourdes charges, les chercheurs essaient d’intégrer ces facultés à de petits robots pas plus gros qu’une pièce de monnaie. L’une des plus grandes difficultés pour les scientifiques est la mise au point de capteurs visuels, semblables aux yeux et aux antennes d’une abeille.
Mais le but ultime du projet Robobee est de concevoir le logiciel qui sera en quelque sorte le cerveau de l’abeille-robot. Ce dispositif devra assurer entre autre le contrôle du vol, la détection d’objets, la prise de décision et surtout le comportement collectif des Robobee, car les performances des abeilles s’appuient essentiellement sur la collaboration de tous les membres d’une ruche. Cet ambitieux projet reçoit chaque année un budget de 2 millions de dollars.
Mais les débouchés, à travers les matériaux, les techniques de fabrication et les composants qui apparaissent durant son développement pourraient s’avérer encore plus importants. Par exemple, le processus de fabrication de pop-up pourrait permettre la création d’une nouvelle classe de dispositifs médicaux complexes. L’Office de Développement de la Technologie d’Harvard, en collaboration avec SEAS Harvard et l’Institut Wyss, est déjà dans le processus de commercialisation de certaines des technologies sous-jacentes.
«Exploiter la biologie pour résoudre les problèmes du monde réel est l’enjeu de l’Institut Wyss », déclare Don Ingber, Directeur fondateur de l’Institut. «Ce travail est un bel exemple de collaboration entre des scientifiques et des ingénieurs de diverses disciplines pour mener des recherches inspirées par la nature et axée sur l’innovation. »
Et le projet continue…
«Maintenant que nous avons cette plate-forme unique, des dizaines de tests peuvent être entrepris, y compris des manoeuvres de contrôle plus agressives et les techniques d’atterrissage».
Les prochaines étapes consisteront à intégrer les travaux de nombreuses équipes de recherche qui travaillent sur le cerveau, le comportement de la coordination de la colonie, la source d’alimentation, et ainsi de suite, jusqu’à ce que les insectes robotiques soient entièrement autonomes et sans fil.
En effet, les prototypes sont encore attachés par un câble d’alimentation très mince, car il n’y a pas de solutions « off-the-shelf « de stockage d’énergie qui soient suffisamment petits pour être montés sur le corps du robot. Les piles à combustible à haute densité d’énergie doivent être mises au point avant que les RoboBees puissent voler en toute indépendance.
« Les mouches effectuent des excercices de voltige des plus étonnants en utilisant uniquement de minuscules cerveaux», note le co-auteur Sawyer B. Fuller, chercheur post-doctoral dans l’équipe qui étudie essentiellement le comportement des mouches face aux fruits les jours de grand vent. «Leurs capacités dépassent ce que nous pouvons faire avec notre robot, donc nous aimerions mieux comprendre leur biologie et l’appliquer à notre propre travail. »
L’étape de ce premier vol contrôlé représente une validation de la puissance des rêves : « Ce projet fournit une motivation commune pour les scientifiques et les ingénieurs de l’Université de construire des batteries plus petites, pour concevoir des systèmes de contrôle plus efficaces, et de créer des matériaux plus légers et plus solides», dit Wood. « Que pourriez-vous attendre de tous ces gens qui travaillernt ensemble : experts de la vision, biologistes, spécialistes des matériaux, ingénieurs électriciens ; qu’ont-ils en commun? Eh bien, ils se réjouissent tous de résoudre des problèmes vraiment difficiles « .
« Je veux créer quelque chose que le monde n’a jamais vu auparavant», ajoute Ma. «Il s’agit de repousser les limites de ce que nous pensons que nous pouvons faire, les limites de l’ingéniosité humaine. »
(Source : Harvard Gazette – Mai 2013)
{jacomment on}