Swumanoid, robot humanoïde mis au point au Japon par le Tokyo Institute of Technology, est capable de reproduire les mouvements complexes du crawl, du dos crawlé et du papillon. Le but : mesurer l’efficacité des gestes et l’hydrodynamique pour améliorer la technique des nageurs. L’un des créateurs a répondu aux questions de Futura-Sciences.
Trouver le geste parfait pour nager toujours mieux, toujours plus vite. Telle est la quête des nageurs de haut niveau qui se sont une fois de plus illustrés lors de ces Jeux olympiques de Londres. Pour ces athlètes hors norme, la performance se cache dans les détails et chaque trouvaille peut conférer un avantage décisif sur la concurrence. Pour cela, la recherche sportive s’appuie essentiellement sur l’analyse des mouvements grâce à la vidéo. Problème, cette méthode empirique implique que les nageurs soient capables de reproduire, dans l’eau, leurs gestes avec précision et constance. Il est par ailleurs très difficile d’effectuer des mesures en utilisant des capteurs qui peuvent gêner l’athlète.
La solution viendra peut-être de Swumanoid, un robot nageur humanoïde conçu par deux chercheurs du Tokyo Institute of Technology, Motomu Nakashima et Chung Changhyun. Doté de quatre membres articulés mus par 20 minimoteurs électriques étanches, il est capable de reproduire les mouvements spécifiques de trois nages (le crawl, le dos crawlé et le papillon) et d’apporter des informations fiables sur la force motrice générée par les mains, les bras, les jambes ainsi que la résistance du corps dans l’eau. Swumanoid a été construit à la moitié de l’échelle humaine, mais le volume et le poids de chacune de ses pièces ont été calculés pour reproduire les proportions et la gravité. Il pèse au total 5,5 kg pour 900 mm de haut et 270 mm de large. Le corps et les membres du robot ont été réalisés en acrylonitrile butadiène styrène (ABS) – une matière plastique robuste – grâce à une imprimante 3D.
L’articulation de Swumanoid
Les minimoteurs électriques ont, quant à eux, été modifiés pour pouvoir loger dans les parties les plus étroites des articulations (bras, jambes, chevilles). Douze moteurs assurent les mouvements complexes des bras. Au total, Swumanoid dispose de 21 degrés de liberté : 14 pour les membres supérieurs dont 4 pour les bras et 2 pour chaque épaule et 7 degrés pour les membres inférieurs. « L’une des principales difficultés que nous avons rencontrées concerne la grande variété de mouvements à la jonction de l’épaule. Pour résoudre cela, nous avons ajouté un joint supplémentaire sur chaque épaule afin de reproduire la rétraction scapulaire », explique Motomu Nakashima à Futura-Sciences.
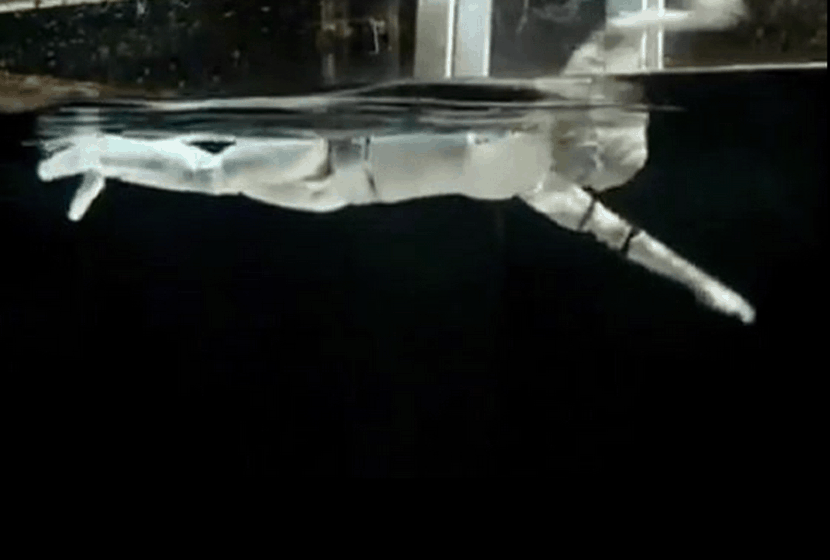
L’équipe de chercheurs japonais a utilisé un scanner 3D pour capturer les mouvements effectués par un nageur de compétition et ensuite s’en servir pour apprendre à nager à Swumanoid. Le robot n’est pas encore autonome, il est piloté à distance par un ordinateur. Swumanoid est, certes, loin d’atteindre la fluidité des mouvements humains, mais le résultat est plutôt impressionnant lorsqu’on le voit nager le crawl en reproduisant fidèlement les gestes.
Vidéo de présentation de Swumanoid, le robot-nageur mis au point par le Tokyo Institute of Technology. © DigInfo, YouTube
Swumanoid, sauveteur en mer ?
« Avec ce robot, nous pouvons mesurer les différences entre les forces motrices des divers mouvements, même si les différences de gestes sont minimes. De telle sorte que nous pouvons savoir quel geste est efficace pour maximiser la force motrice », ajoute le professeur Nakashima. Ce dernier envisage de nombreux débouchés pour Swumanoid qui pourrait, un jour, devenir un sauveteur capable d’aider des nageurs en difficulté. Les progrès réalisés sur le système d’articulation et les mouvements pourraient aussi ouvrir la voie à de nouveaux robots sous-marins.
Il reste cependant un long chemin à parcourir. Car pour le moment, Swumanoid est encore très lent et ne peut fonctionner que relié à une série de bras de soutien. « Nos objectifs à venir consistent à réaliser des essais autonomes sans supports et à développer un algorithme de contrôle de la posture durant la nage », précise Motomu Nakashima. Selon lui, il faut compter encore 10 à 15 ans avant d’imaginer qu’un tel robot puisse jouer les sauveteurs en mer.
{jacomment on}