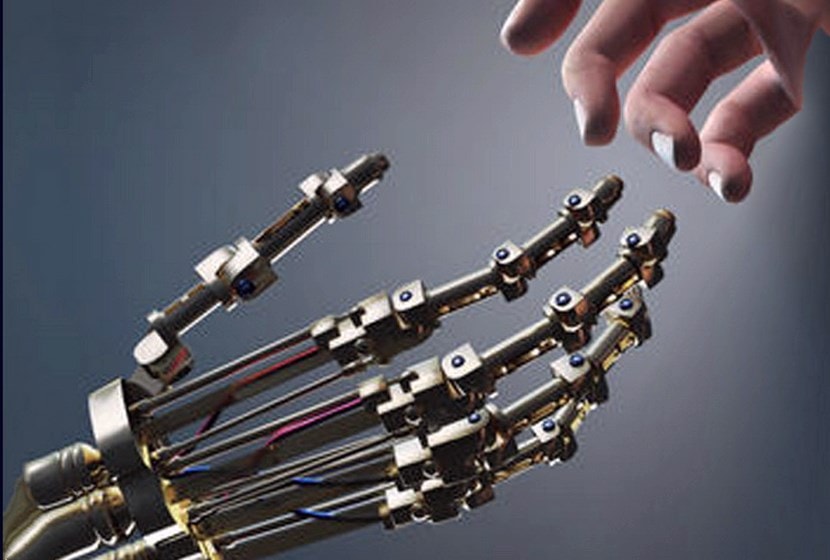
Une grande première mondiale : des chercheurs ont créé une main robotisée, similaire à celle de l’homme et capable d’attraper des objets.
La première main robotique, de taille humaine a été mise en place par des chercheurs européens du projet Dexmart. Alors qu’aucun laboratoire de robotique n’avait jusqu’à présent été en mesure de construire des mains d’homme à la bonne taille, la communauté robotique a donc su résoudre le problème de la manipulation.
« Pour que les robots transforment véritablement la vie et le travail des humains, il faut qu’ils soient capables de manipuler des objets comme les individus le font avec leur main » explique le professeur Bruno Siciliano de l‘Université de Naples, en Italie (Università degli Studi di Napoli Federico II). Ce dernier est à l’origine d’un anthropomorphe d’une main robotique à cinq doigts en mesure de manipuler des œufs, ramasser une carte de crédit, ou encore attraper un stylo. Exemple ultime de la manipulation habile, la main de l’homme a en fait servie de modèle pour la création du prototype. La capacité de cette main robotique est si proche de celle de l’homme, qu’imaginer des robots assistants pour le ménage, dans des salles d’opérations ainsi que dans les milieux industriels est de plus en plus réaliste.
Comment ça marche ?
Pour créer cette main, les chercheurs ont utilisé des chaines tordues par des petits moteurs à haute vitesse. Ainsi, ils sont « en mesure d’exercer des forces de traction élevées dans un espace compact » explique Chris May chercheur en mécatronique à l’université de la Sarre en Allemagne. Les cordes torsadées faites en polymère solide permettent au prototype de la main de soulever une charge de cinq kilogrammes en une fraction de seconde.
« Chaque doigt robotique est comme un doigt humain avec trois segments. Il peut être contrôlé avec précision par l’intermédiaire des tendons individuels » explique le chercheur Gianluca Palli de l‘Université de Bologne, ville dans laquelle le premier prototype a été mis en place.
Une main avec un cerveau
Les robots, en particulier ceux de compagnie, doivent se comporter de manière autonome. « Ils doivent répondre à des situations avec des moyens appropriés pour lesquels ils ne sont pas pré-programmés » explique le professeur Siciliano. Il estime que les robots, tout comme les humains, ont besoin d’apprendre par l’observation. Les chercheurs ont donc utilisé une technologie de traitement d’image afin d’étudier en détail les mouvements de la main humaine. Ils ont placé des repères visuels sur un gant sensoriel et ont enregistré diverses manipulations. Les algorithmes de traitement d’image ont suivi les mouvements de chaque marqueur grâce auxquels les chercheurs ont créé des règles sur la façon dont la main robotique doit gérer et manipuler des objets.
Le consortium étudie actuellement la viabilité commerciale de la production de mains entièrement fonctionnelles, initialement pour la communauté universitaire pour les études de robotique.
Article paru dans http://www.atelier.net / 22 aôut 2012
{jacomment on}




jrigole jvous aimes tqt