Chaque jour les médias relatent de nouvelles performances que les robots peuvent acquérir. Ils savent marcher, courir, escalader, jouer. Mais ils n’ont aucun sens du toucher et sont dénués de toute sensibilité. Des chercheurs suisses ont inventé une super-fibre élastique, multimatériaux, bardée d’électrodes, qui remplirait parfaitement les fonctions d’un nerf.
Des ingénieurs de l’École Polytechnique Fédérale de Lausanne (EPFL) en Suisse, associés à des équipes de l’université de Berlin, sous la conduite du professeur Fabien Sorin, ont récemment publié dans la revue Advanced Materials les résultats de leur découverte : des câbles capables d’envoyer des signaux électroniques en réponse au toucher qui pourraient remplir les fonctions d’un nerf pour les robots.
Fondamentalement, ce « nerf » se présente sous la forme d’une minuscule fibre d’élastomère intégrant divers matériaux tels que des électrodes ou des polymères nano-composites. Cette fibre est capable de ressentir très précisément chaque pression et distorsion exercée sur elle, et peut se déformer de près de 500 %, avant de revenir à sa taille initiale
Pour parvenir à fabriquer ce « nerf », l’équipe a, dans un premier temps, assemblé une version macroscopique de la fibre, avec des matériaux organisés selon un motif tridimensionnel bien défini. Cette préforme est ensuite chauffée, puis étirée comme du plastique fondu, jusqu’à former des fibres de quelques centaines de microns de diamètre.
À l’intérieur, les motifs s’allongent le long de l’axe de la fibre, mais rétrécissent dans la direction transverse. Leur positionnement relatif ne change pas, et on obtient une fibre dotée d’une microarchitecture d’une grande complexité.
Jusqu’ici, seules des fibres rigides pouvaient être produites avec cette méthode, mais les scientifiques ont utilisé un type d’élastomères thermoplastiques présentant une viscosité élevée lors du chauffage. Une fois le fibrage terminé, ces fibres peuvent être étirées et déformées, et elles retournent toujours à leur état originel.
Dans un deuxième temps, les ingénieurs ont introduit, à l’intérieur de la fibre, des matériaux rigides comme des polymères nano-composites, des métaux, des thermoplastiques, mais aussi des métaux liquides qui peuvent se déformer facilement. « Nous pouvons par exemple placer trois canaux d’électrodes en haut de la fibre et un en bas. Selon la direction d’où vient la pression, différentes électrodes entreront en contact, envoyant un signal spécifique », explique Fabien Sorin dans un communiqué.
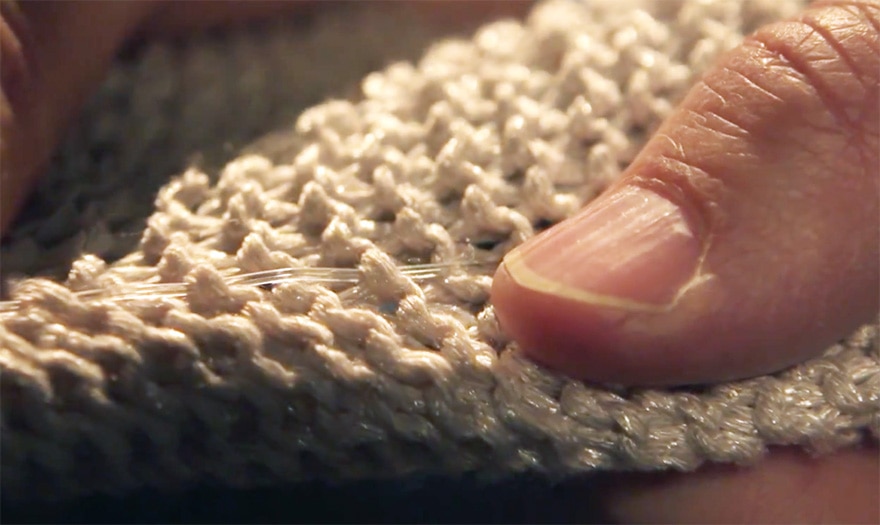
Cette technique permet de connaître le type de déformation subi par la fibre, distinguer une compression d’un cisaillement, par exemple. Avec leurs confrères berlinois, les chercheurs suisses ont intégré leurs fibres sur des doigts robotiques, en tant que nerfs artificiels. À chaque « toucher », la fibre déformée envoie des indications sur l’interaction entre le robot et son environnement tactile.
Jusqu’à présent, les autres techniques développées dans le domaine de l’ingénierie du toucher robotique sont plus volumineuses ou reposent sur des systèmes de transport de fluides encombrants. L’invention des ingénieurs de l’EPFL est intéressante car leur câble est très fin, extensible et peut être produit facilement en grandes quantités. En effet l’équipe à l’origine de cette découverte avance être en mesure de produire plusieurs centaines de mètres de fibre en peu de temps, un peu à la manière des fibres optiques.
Les débouchés pour la robotique sont immenses mais l’équipe suisse pense aussi à adapter sa technologie pour tisser des vêtements intelligents qui réagiraient en « sentant » leurs porteurs et pourraient réagir aussi à leur environnement. Ils envisagent aussi l’intégration de claviers tactiles dans les vêtements ou la mise au point de prothèses médicales sensibles. En attendant ces débouchés industriels, l’équipe dépose nombre brevets.
À suivre.

Sources : futurism, EurekAlert, ARCinfo
Quelque chose à ajouter ? Dites-le en commentaire.